ARUCO¶
The ARUCO node detects ArUco / AprilTag fiducial markers in an image stream and outputs the pose (position and rotation) of each configured marker board. It is a transformer: it consumes images from a camera node (e.g. GENICAM) and produces pose data.
Usage¶
Set the node’s source to the camera node to analyze, then configure the marker dictionary and one or more boards.
Properties¶
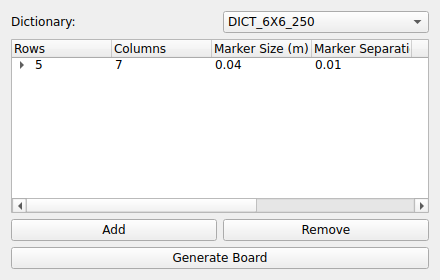
Dictionary: The ArUco marker dictionary the markers were generated from (for example a 6x6 dictionary). This must match the printed markers.
Boards: A list of marker boards to detect. Each board describes its layout (rows, columns, marker size and separation), the marker ids it contains, and an optional position/orientation offset so the reported pose is expressed in your chosen coordinate frame.
Accurate poses require a calibrated camera; use the DISTORTION node to rectify the image stream first if your camera has significant lens distortion.