DISTORTION¶
The DISTORTION node corrects camera lens distortion in an image stream. It is a transformer: it consumes images from a camera node and republishes an undistorted image stream, which improves the accuracy of downstream pose estimation (ARUCO, CHESSBOARD).
Calibration is performed by showing a chessboard to the camera and collecting detections; from these the node estimates the camera matrix and distortion coefficients used to rectify subsequent frames.
Properties¶
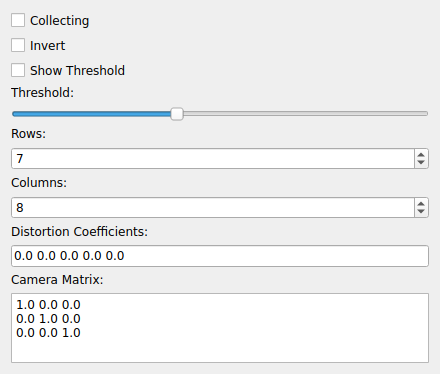
Rows / Columns: The dimensions of the calibration chessboard.
Threshold: Detection threshold used when finding the chessboard.
Show Threshold: Display the thresholded image to aid setup.
Invert: Invert the image before detection (for dark-on-light vs light-on-dark boards).
Collecting: When enabled, accumulate chessboard detections for calibration.
Camera Matrix: The 3×3 intrinsic camera matrix (estimated during calibration, and reused once solved).
Distortion Coefficients: The lens distortion coefficients applied to rectify the image.